サーボコントローラ(2型) |
||
|
|
||
| サーボ信号を生成して、ダイレクトにサーボモータを動作させます。 リンケージや動作チェックでちょっとサーボを動かしたいときに受信機なしで動作します。 電動機のスピードコントローラ(ESC)を動作させることも出来ますので、ESCの正確な動作ポイントなども確認できます。 ESCのBECで動作させる場合は当コントローラ側は電源不要です。 信号生成と計測部は別回路となっているため入力を切り替えることで、受信機からの信号を入力してパルス長、周期をチェックすることもできます。 表示部は0.001msの解像度あります。これはPCMプロポの解像度と同等ですので、受信機に接続すれば、送信機のニュートラル特性やトリム1コマの変化もきちんと見えます。 (2型)での変更内容 生成信号範囲(0.900ms〜2.100ms)をほぼ正確にカバーできるようにアナログ回路部を見直しました。 完成基板(レジスト付き)となり信頼性が向上しました! (キットですので、部品のはんだ付けは必要です) 更新状況 (変更内容、問題点等) (2005.04.03) (2006.08.01) (2006.09.12) CMOS-4011 の場合、動作用のバッテリ(受信機用バッテリ等)の電圧が高い場合(概ね5.5V)、受信機からのサーボ信号を検出できなくなります。そのような状況で使用する場合は、CMOS-4001 でご使用ください。 CMOS-4001の場合は動作電圧が6V程度でも、受信機用信号をきちんと検出可能です。(現在販売中のキットには、4001 が入っています。) |
||
|
[サーボコントローラ2型の回路図 gif形式]
←回路図は上記資料一式に含まれています。 |
||
| 作りはじめる前に |
||
|
■ケースに入れるのであれば タカチ製
プラスチックケース SW-120 W60XH24XD120 |
||
|
|
||
ハンダごては10〜20W程度、プリント基板用ハンダ径0.5〜1.0mmが適しています。 前作(1型)の製作例に多少詳しく説明していますので参考にしてください。 |
||
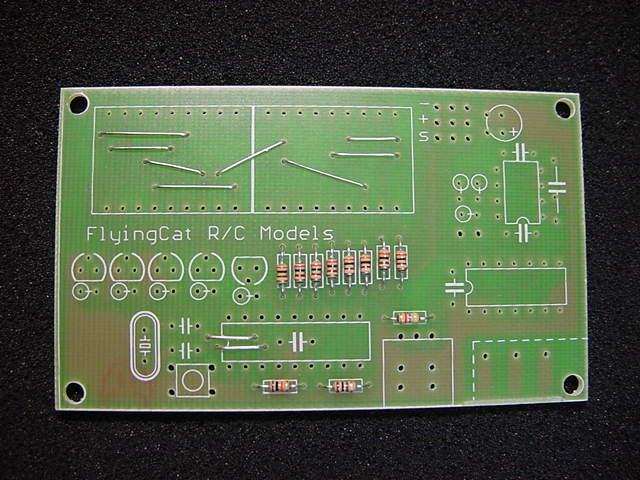 |
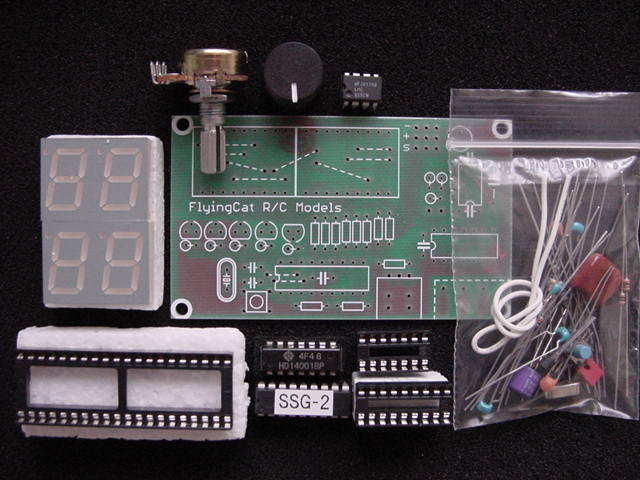
最初に300Ω、10KΩ、100Ω、47KΩの抵抗を取り付けます。その切り取った足をジャンパー線に利用します。 その後は背の低い順番に部品を取り付けます。 注)300Ωと10kΩは色並びが似ているので良く確認してください。 |
|
 |
右上のタイマーICはソケットを使わないで直付けします。(動作が安定します) 40ピンのICソケットはケースに入れる際の高さ調整のために使用可能です。足の数の方が穴数よりも多いので、不要な足は切り取ってください。 18ピンのソケット底部はジャンパー線と干渉すので、カッター等で加工してください。 (2005.04.03) 写真の3Pスイッチはジャンパーピン方式に変更しました。基板穴はありますので、スイッチを使用することも可能です。(現在のキットには3Pスイッチは付属しません) |
|
 |
電源を入れる前に、部品の向きとハンダブリッジ(ショート等)が無いことを確認してください。 | |
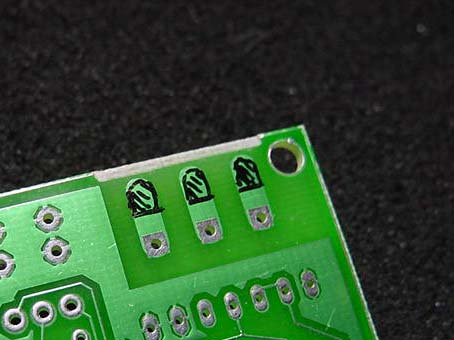 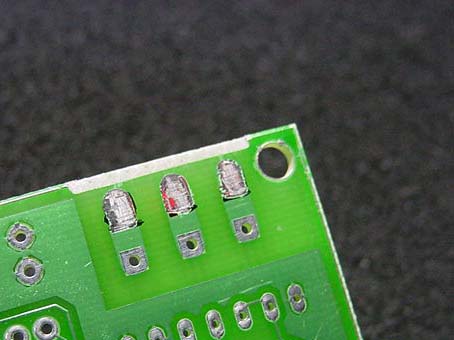 |
この作業は2005年3月以前のキットに付属している基板の場合です。現在のキットの基板はこの作業は不要です。 |
|
|
|
||
加工済みケースを webshop で販売しています。 【別売の加工済みケースご使用にあたっての注意事項】 |
||
  |
ケースへ入れる場合は、ボリュームの位置にもよりますが、基板の右下隅はあらかじめ切り落とした方が良いでしょう。 マークした端子孔へ5mmのドリルで穴を開けて端部を切り取ります |
|
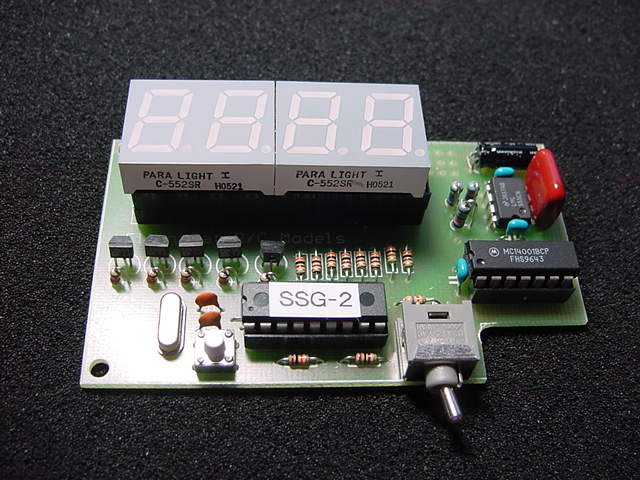 |
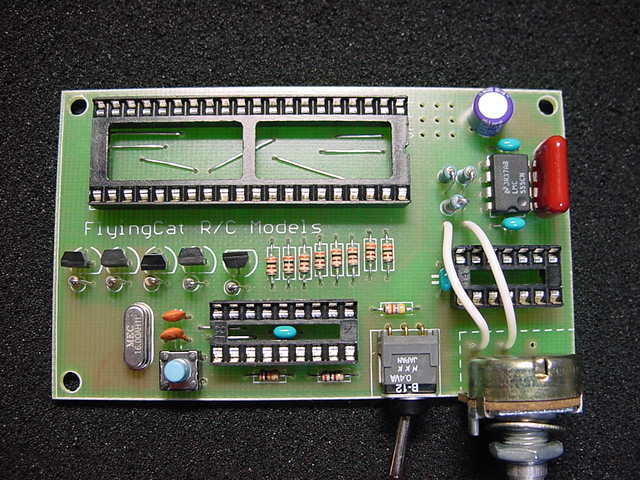
配線を除き、ここまで作ります。
切替スイッチはオプション(別売)です。 7セグLEDはソケット2段でかさ上げしています。 |
|
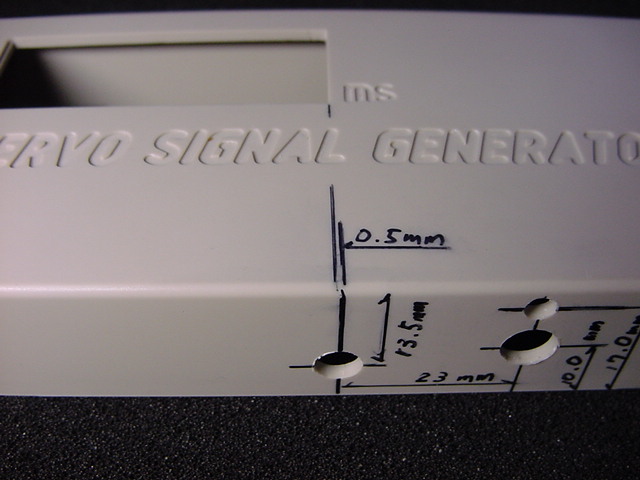 |
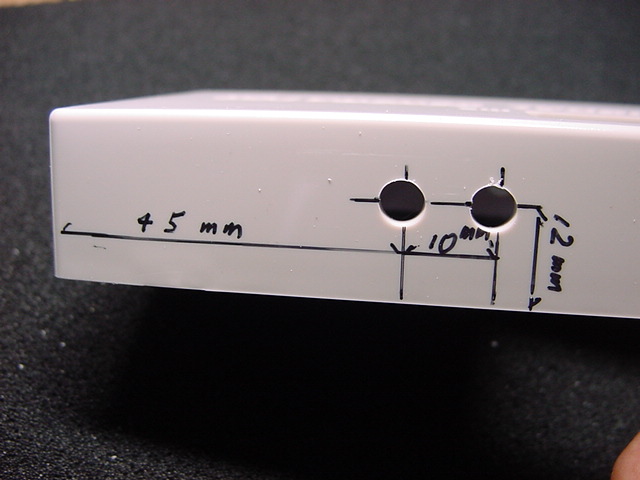
表示切替スイッチ(別売)とボリュームの孔位置です。 LED部の開口部の右端が基準位置となります。 ケース下側へ垂直に線を引き、右に0.5mmのところがスイッチの基準線です。ケース上面から13.5mmのところへポンチを打って錐などで孔を開けて、シャーシーリーマーなどで穴を広げます。 ABS樹脂なので加工性は良いです。ドリル等でいきなり孔を開けるより上記の方法で作業した方が修正が利きますので良いかと思います。 |
|
|
|
右側の孔はボリューム用です。スイッチの位置から右に23mm位です。 | |
 |
 |
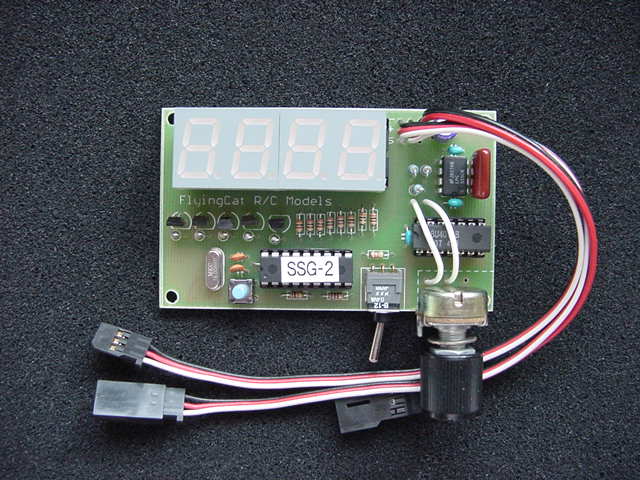
仮組しています。 |
 |
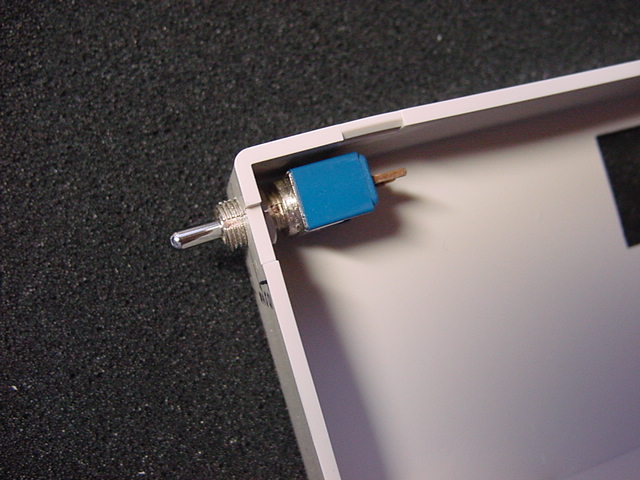 |
電源スイッチ(別売)の位置決めをします。
バッテリを入れるため、端に寄せています。 |
 |
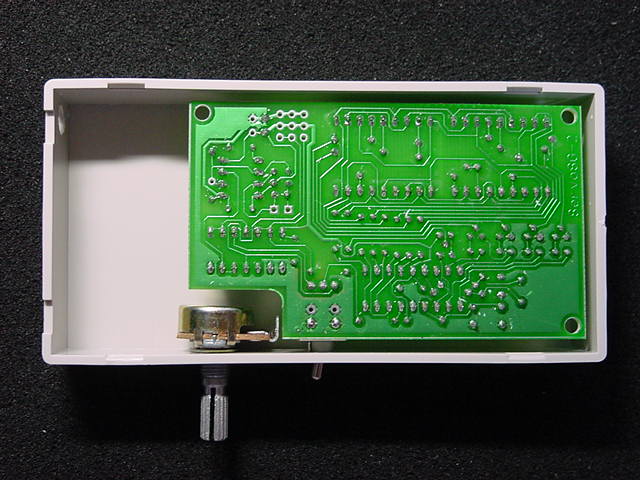
こんな感じで納まります。
バッテリは単4サイズのニッケル水素電池を4本内蔵可能です。 |
|
 |
反対側のサーボリードの引き出し位置です。 これは多少ずれても問題無いです。 |
|
| 使用例 |
||
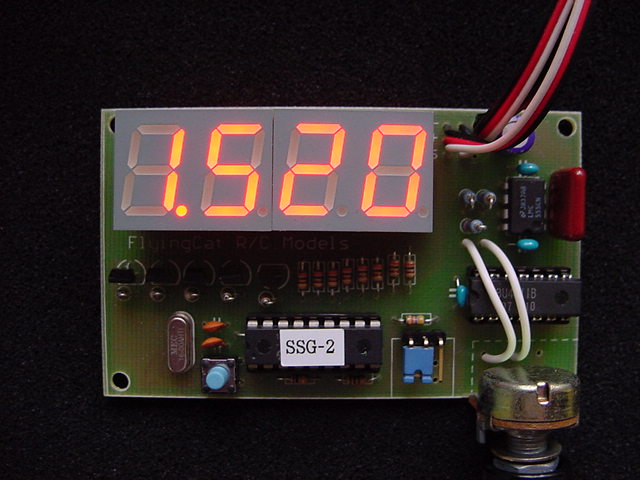
| ■送信機の精度(安定度)をチェックする場合(エルロン)■ サーボコントローラ -> 受信機の1ch(エルロン)に接続 表示切替スイッチ -> 左側(外部信号) バッテリは受信機側又はサーボコントローラ側のどちらかに接続 この状態で送信機のスイッチを入れてみてください。 トリムをセンターとすると、フタバ製のセットであれば 1.520 付近の値を表示します。 左側にスティックを動かし、静かにニュートラルに戻してみてください。 同様に右側に動かして戻してみます。 ニュートラル時の値がどの位変化するでしょうか? 自分のFF9は1.518〜1.522程度となり 0.004msのブレがありました。 エルロンの場合はさほど問題になりませんが、ヘディングロックのジャイロ を使用するラダーなどの場合はセンターが合わなくなってくるはずです。 (0.004msはトリム1コマに相当します。) 1ch〜4chはスティックに接続されたボリュームの良し悪しにより、ニュートラルの安定度が決まってくると思われます。 ■サーボを単体で動作させる場合■ サーボコントローラ -> サーボに接続 表示切替スイッチ -> 右側(生成信号) バッテリはサーボコントローラ側に接続 ボリュームにより生成信号長が変化してサーボが動作します。 この状態で最大動作範囲、"感度"が分かります。 "感度"とは生成信号を微妙に変化させてサーボが反応するかということです。デジタルサーボ等のいわゆる高級サーボは0.001msの解像度があることが分かります。 一昔前のサーボとか、最近の台湾製のマイクロサーボのなかには、0.010msの感度がないものもあります。これではトリムが利かないですよね。 使い込んだサーボなどもたまにチェックしてみます。サーボのボリュームがへたってくると動きがおかしくなってくることが数値的につかめます。 ■CCPMタイプのヘリのメカ積み■ サーボのニュートラルを正確に出してからへりに搭載しています。 サーボを単体で動作させる場合と同じ手順ですが、ボリュームを廻して、 信号長を1.520msとします。 この状態でサーボホーンを90°づつ位置を替えて取り付けてみて、一番直角に近い状態とします。次に三角定規などを使って完全に90°となる位置にサーボコントローラで調整します。この時の表示値をメモっておきます。 ”送信機の精度(安定度)をチェックする場合”と同様にして、そのサーボを使用するチャンネルのサブトリムを調整します。先ほどメモした値となるようにサブトリムを調整するわけです。 ■異なるメーカ間の調整■ このようなことにも威力を発揮します。 aa_mn-010.htm |
||


![[サーボコントローラ2型の回路図 gif形式]](ssg-2-circuit.gif){kind=link}
{kind=link}